8.6 KiB
AgentOccam
Code for "AgentOccam: A Simple Yet Strong Baseline for LLM-Based Web Agents" (ICLR 2025).
AgentOccam offers a simple but strong baseline for LLM-based web agents. By providing a URL and the task you want it to perform, AgentOccam can execute it for you. Its simplicity and effectiveness allow you to run it directly, or adapt it into a larger pipeline for its executing web tasks, such as web information retrieval before processing the documents.
Without using in-context examples, new agent roles, online feedback, or search strategies, AgentOccam demonstrates impressive performance on tasks in WebArena (a web simulator benchmark with tasks from sites like shopping, shopping admin, GitLab, Reddit, map, etc.) and tasks with golden answers in WebVoyager (a benchmark based on real web tasks), once surpassing the SOTA on both leaderboards.
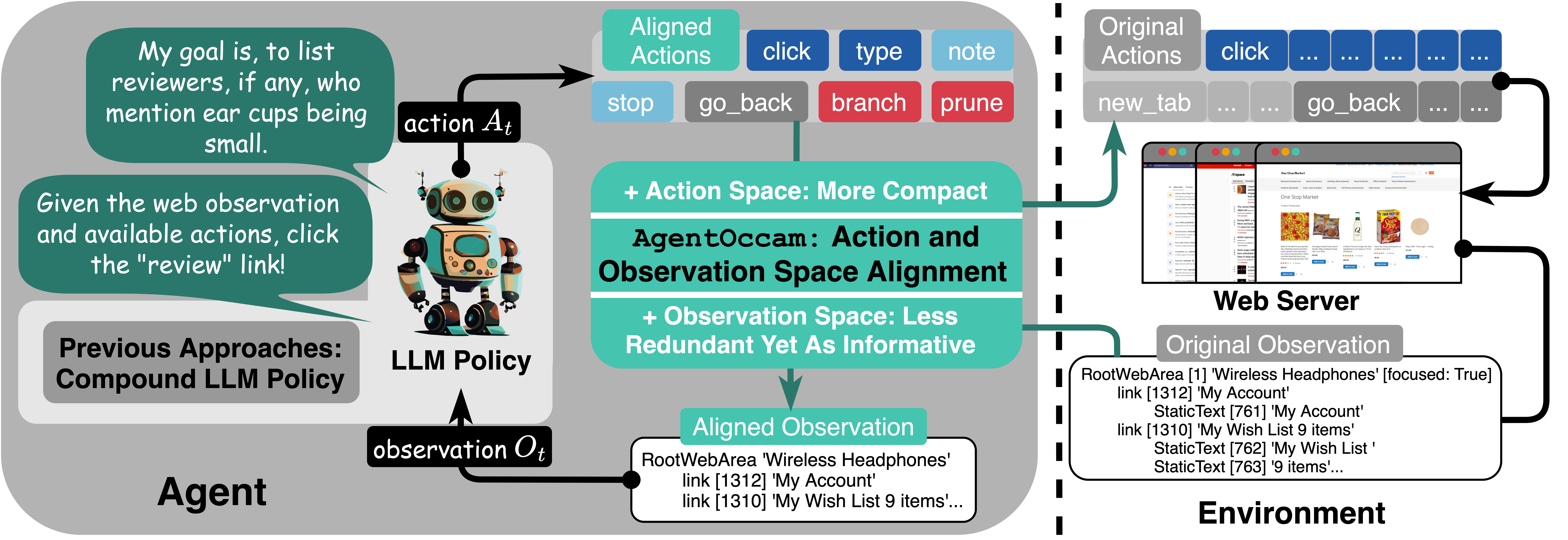
In brief, our approach aligns the input (webpage descriptions, i.e., agent observations) and output (action strings that can be translated into web interactions, i.e., agent actions) of web tasks, with the tasks that LLMs are most familiar with, such as reading comprehension and question-answering. We refer to our approach agent observation and action space alignment, shedding light on LLMs' impressive zero-shot performance on web tasks, and the critical role of carefully tuning observation and action spaces for LLM-based agents.
You can let AgentOccam interact with other websites by defining task config files, as seen in the example in config_files/tasks/Allrecipes--3.json. Have fun playing with it! :)
WebArena Replication
Environment Setup
git clone https://github.com/web-arena-x/webarena.git
cd webarena
conda create -n webarena python=3.10; conda activate webarena
pip install -r requirements.txt
pip install --upgrade transformers
pip install --upgrade openai
pip install numpy==1.26.4
playwright install
pip install -e .
cd ../AgentOccam
pip install -r requirements.txt
mkdir .auth
Experiments
AgentOccam-Series and SteP-Replication (Please refer to SteP's official repo for their latest agent code.)
- Connect to the WebArena host server.
- Export the env configs:
export SHOPPING="http://<webarena_server_address>:7770"
export SHOPPING_ADMIN="http://<webarena_server_address>:7780/admin"
export REDDIT="http://<webarena_server_address>:9999"
export GITLAB="http://<webarena_server_address>:8023"
export MAP="http://<webarena_server_address>:3000"
export WIKIPEDIA="http://<webarena_server_address>:8888/wikipedia_en_all_maxi_2022-05/A/User:The_other_Kiwix_guy/Landing"
export HOMEPAGE="http://<webarena_server_address>:4399"
export OPENAI_API_KEY="<openai_api_key>"
export GEMINI_API_KEY="<gemini_api_key>" # Optional, we provide several other agent base models, such as Claude and LLaMa.
- Login in:
python browser_env/auto_login.py
- Test AgentOccam:
python eval_webarena.py --config AgentOccam/configs/AgentOccam.yml # Replace the yml config with your target one.
You can use directly run bash script/run_config.sh after replacing the experiment configurations.
Please check whether reddit post exceeds limits, login expires, or any other webarena simulator/website failure exists when you finish one round at WebArena. Additionally, LLM policy varies even given the same task, as the generation temperature is set to >0 for more diverse exploration. Therefore, it is expected that you can get difference traces when starting the same task multiple times. Try it out with the basic config_files/tasks/Allrecipes--3.json.
WebArena-Agent (Please refer to WebArena's official repo for their latest agent code.)
bash scripts/run_webarena.sh
Trajectories
Placed at this link.
Human Assessment
Placed at files/human_assessment/WebArena-AgentOccam.csv.
WebVoyager Replication
Environment Setup
git clone https://github.com/EmergenceAI/Agent-E.git
cd Agent-E
./install.sh
source .venv/bin/activate
uv pip install beartype
uv pip install gymnasium
uv pip install lxml
uv pip install text_generation
uv pip install aiolimiter
uv pip install boto3
uv pip install transformers
export OPENAI_API_KEY="<openai_api_key>"
export AUTOGEN_MODEL_NAME="gpt-4-turbo"
cd ../AgentOccam
Experiments
AgentOccam
python eval_webarena.py --config AgentOccam/configs/AgentOccam-WebVoyager.yml
Agent-E (Please refer to Agent-E's official repo for their latest agent code.)
python -m agente_replication --task_ids Allrecipes--3
Trajectories
Placed at this link.
Human Assessment
Placed at files/human_assessment/WebVoyager-AgentOccam_*.csv.
Agent Configuration Explanation
They following are compiled based on AgentOccam/configs/AgentOccam.yml.
General
logdir: "../AgentOccam-Trajectories"
This determines where the trajectories will be saved. Use relative path.
logname: "AgentOccam"
agent:
others:
logname: "AgentOccam"
All relevant online files (play series, trash series, and output/screenshot series) will use this log name to differentiate. Change them simultaneously.
Agent
Base
agent:
actor:
debug: 0
verbose: 1
number: 1
critic:
mode: false
debug: 0
verbose: 1
judge:
mode: false
debug: 0
verbose: 1
All roles have a debug key. When debug==1, it plays and you decide whether to take its action. When debug==2, you will have to generate the action yourself. The actor is always playing so there's no mode key for it. For other roles, you can disable them by changing mode to false.
agent:
actor:
model: "gpt-4-turbo"
determines which model to use.
agent:
actor:
input: ["step", "objective", "previous plans", "interaction history", "current observation"]
arranges the input. The list element order matters here and this applies to all the following list input/output specifications.
agent:
actor:
interaction_history:
verbose: True
type: ["text"]
step_num: 3
determines the interaction history section input type and modality. You can use type: ["text", "image"] to enable multimodality inputs.
agent:
actor:
current_observation:
type: ["text"]
defines the current observation type.
agent:
actor:
output: ["interaction history summary", "observation description", "reason", "action", "observation highlight"]
organize the output specifications, and capable LLMs should generate those content, which would be parsed automatically by the code. You only need to add the description for that entry under AgentOccam/prompts/output_specifications.
agent:
actor:
planning_command: ["branch", "prune"]
navigation_command: ["click", "type", "stop", "note", "go_back"]
defines the valid actions.
agent:
actor:
play: ["step", "objective", "previous plans", "observation description", "reason", "action"]
trash: ["objective", "step", "url", "instruction", "online input", "response", "alter ego response"]
designates the broadcasting content.
Advanced
agent:
actor:
number: 1
If you use best-of-N-actions with judge, the number here defines the N.
agent:
actor:
identities:
identity_0:
name: "QA"
model: "gpt-4-turbo"
output: ["response"]
identity_1:
name: "planning"
model: "gpt-4-turbo"
planning_command: ["branch", "prune"]
output: ["interaction history summary", "observation description", "reason", "plan", "observation highlight"]
identity_2:
name: "reflection"
model: "gpt-4-turbo"
planning_command: ["branch", "prune"]
navigation_command: ["click", "type", "stop", "note", "go_back"]
output: ["interaction history summary", "observation description", "reflection", "reason", "action", "observation highlight"]
defines different actors. If you don't want them, comment them.
Environment
env:
fullpage: true
prune: true
If fullpage==True, the agent takes the entire page as the input. Remember to add scroll to the navigation_action list if fullpage is disabled.
If prune==True, the pipeline carries out observation space alignment.